



業(yè)應用(yòng)")


程案例")

RELIABLE QUALITY PERFECT SERVICE
可(kě)靠的(de)質量 ● 完善的(de)服務
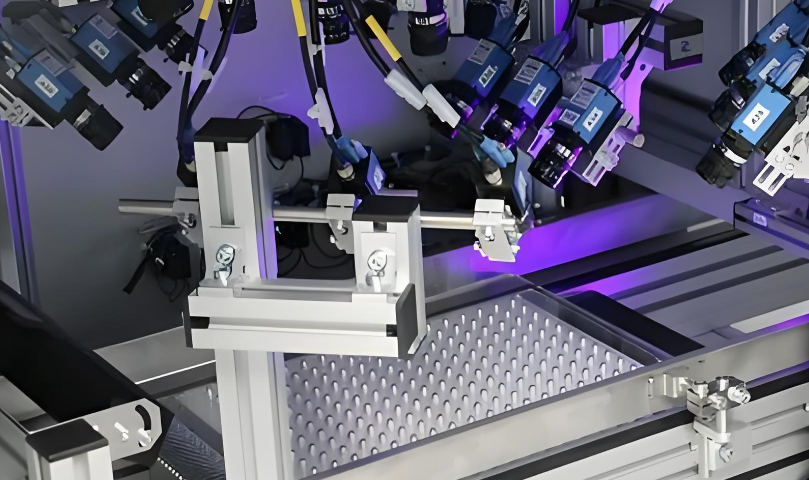
機(jī)器(qì)視(shì)覺的(de)表面缺陷檢測
發布時(shí)間(jiān):
2025-07-11
來(lái)源:
表面缺陷是(shì)工(gōng)業(yè)産品生(shēng)産中不(bù)可(kě)避免的(de)問(wèn)題,如(rú)果不(bù)及時(shí)發✔現(xiàn)處理(lǐ),将會(huì)影(yǐng)響産品的(de)外(wài)觀質量及性能(néng),導緻企業(yè)生(shēng)産效益下(xià)降。現(xiàn)如(rú∏)今,基于機(jī)器(qì)視(shì)覺的(de)表面檢測方法在很(hěn)多(duō)現(xiàn)代化(huà)企業(yè)中得(de)到(dào)了(le)廣泛的ε(de)應用(yòng),在文(wén)中将分(fēn)析主流機(jī)器(qì)視(shì)覺檢測方法的(de)優缺點,并指出現(xiàn)有(yǒu)機(j∏ī)器(qì)視(shì)覺檢測技(jì)術(shù)存在的(de)問(wèn)題和(hé)對(duì)以後的(de)發展趨勢做(zuò)進一(±yī)步的(de)展望。
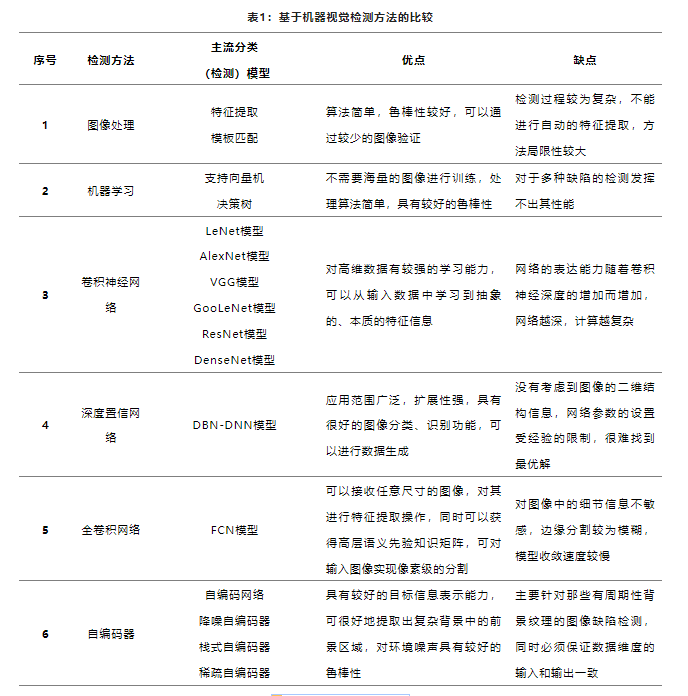
各種檢查方法的(de)比較
基于機(jī)器(qì)視(shì)覺的(de)缺陷檢測方法的(de)比較如(rú)表1所示,包括各種方法的(de)主流分(fēn)類(≥檢測)模型、優缺點對(duì)比。
存在的(de)問(wèn)題
基于機(jī)器(qì)視(shì)覺的(de)表面缺陷檢測技(jì)術(shù)在理(lǐ)論研究和(hé)工(≈gōng)業(yè)實際應用(yòng)中均取得(de)了(le)滿意的(de)成果,但(dàn)現(xiàn)階段仍存在以下(xià)問(wèn)題和(hé)難點。
(1)在圖像采集階段,受光(guāng)照(zhào)條件(jiàn)、現(xiàn)場(chǎng)環境、拍(pāi)♦攝角度和(hé)距離(lí)等因素的(de)影(yǐng)響,被檢測物(wù)體(tǐ)的(de)表觀特征會(huì)産生(shēng)變化(huà),對(duì)檢測精度産生(shēng)一(yī)定的(de)影(yǐng)響,同時(shí),α噪聲的(de)幹擾以及被檢測物(wù)體(tǐ)的(de)部分(fēn)遮擋也(yě)會(huì)影(yǐng)響到(dào)圖像的(de)質量,降低(d≤ī)系統的(de)檢測性能(néng)。如(rú)何提高(gāo)圖像采集的(de)質量,降低(dī)外(wài)界因素的(de)幹擾是(s§hì)需要(yào)解決的(de)問(wèn)題之一(yī)。
(2)傳統機(jī)器(qì)視(shì)覺的(de)缺陷檢測方法依賴于特征模闆的(de)選擇及提取,特征提取"的(de)好(hǎo)壞對(duì)整體(tǐ)檢測系統的(de)檢測精度及性能(néng)有(yǒu)著(zhe)決定性作(zuò")用(yòng),同時(shí)傳統機(jī)器(qì)視(shì)覺的(de)檢測方法需要(yào)人(rén)工(gōng)提取特征信息,不(bù)具有(yǒu)自(zì)動提取全部有(yǒu)用(yòng)特征信息的(de)能(néng)力。如(rú)何參考模闆精度,降低(dī)特征提取的(de)複雜(εzá)性與不(bù)确定性仍是(shì)值得(de)進一(yī)步研究的(de)問(wèn)題。
(3)雖然機(jī)器(qì)視(shì)覺檢測在工(gōng)業(yè)生(shēng)産中已經取得(de)了(le)較好(hǎo)的(de)檢測效果,但(dàn)是(shì)在實際圖像采集過程'中,真實的(de)缺陷數(shù)據較少(shǎo),且表面缺陷種類繁多(duō),形式多(duō)樣,缺 陷特征的(de)提取效率較低(dī),同時(shí),模型對(duì)新産生(shēng)的(de)缺陷類型不(bù)能(néng)進行(xíng)正确識别",不(bù)足以利用(yòng)深度學習(xí)的(de)方法進行(xíng)訓練。如(rú)何獲取足夠的(de)缺陷樣本,保證在實際應用(yòng)中的±(de)準确率是(shì)未來(lái)的(de)研究方向之一(yī)。
(4)從(cóng)缺陷檢測的(de)準确性和(hé)實時(shí)性方面來(lái)看(kàn),盡管機(jī)器(qì)視(shì)覺檢測的∏(de)一(yī)系列算(suàn)法不(bù)斷更新,但(dàn)檢測效率與檢測的(de)準确率與實際生(shē≤ng)産的(de)需求還(hái)具有(yǒu)一(yī)定的(de)差距。如(rú)何解決特征的(de)精确提取,提高(gāo)檢測系統的(d£e)準确性與實時(shí)性仍是(shì)現(xiàn)階段需要(yào)考慮的(de)問(wèn)題。
未來(lái)發展趨勢
目前,機(jī)器(qì)視(shì)覺技(jì)術(shù)已經在醫(yī)學、交通(tōng)航海(hǎi)、工(gōng)業(yè)生(shēng)産等領←域有(yǒu)了(le)突破性進展,基于機(jī)器(qì)視(shì)覺的(de)表面缺陷檢測必将是(shì)未來(lái)的(de)發展趨勢,具體(tǐ)表現(xiàn)為(wèi)以•下(xià)兩個(gè)方面。
(1)目前基于機(jī)器(qì)視(shì)覺的(de)缺陷檢測方法主要(yào)是(shì)對(duì)工(gōn±g)業(yè)相(xiàng)機(jī)獲取的(de)二位圖像進行(xíng)檢測,檢測的(de)對(duì)象是(shì)物(wù)體(t€ǐ)的(de)表面缺陷,而二維圖像的(de)視(shì)野信息比較單一(yī),無法進行(xíng)産品各方位視(shì)野信λ息的(de)表達。如(rú)何通(tōng)過多(duō)個(gè)工(gōng)業(yè)相(xiàng)機(jī)對(duì¥)被檢測物(wù)體(tǐ)進行(xíng)三維建模,獲得(de)檢測目标的(de)空(kōng)間(jiān)信息,提高(gāo)缺陷檢測系統性能(néng)已是(shì)未來(l♣ái)的(de)一(yī)個(gè)重要(yào)發展趨勢。
(2)機(jī)器(qì)視(shì)覺缺陷檢測方法目前還(hái)處于理(lǐ)論研究階段,在實際應用(yòng)中仍達不(bù)到(dà♠o)現(xiàn)代化(huà)工(gōng)業(yè)生(shēng)産中精準化(huà)和(hé)智能(né☆ng)化(huà)的(de)要(yào)求,利用(yòng)機(jī)器(qì)視(shì)覺技(j↕ì)術(shù)設計(jì)産品的(de)分(fēn)揀裝置,結合機(jī)械臂對(duì)缺陷産品進行(xíng)分¶(fēn)類剔除,建立一(yī)套全自(zì)動化(huà)的(de)生(shēng)産線,是(shì)未來( lái)工(gōng)業(yè)生(shēng)産的(de)大(dà)勢所趨。
上(shàng)一(yī)頁


北京中宏軟通科技有限公司
地(dì) 址:北(běi)京市(shì)昌平區(qū)回龍觀鎮國(guó)際信息産業(yè)基地(dì)立業(yè)路(lù)11号
電(diàn) 話(huà):010-69736588 (總機(jī))
傳 真:010-69736588-839
Q Q:1683120202/2158383259
E-mail:zyt@zyttech.com info@zyttech.com