



業(yè)應用(yòng)")


程案例")

RELIABLE QUALITY PERFECT SERVICE
可(kě)靠的(de)質量 ● 完善的(de)服務


汽車(chē)裝配防錯(cuò)檢測系統
- 産品描述
- 産品功能(néng)特點
- 産品實例
-
一(yī)、應用(yòng)背景
在汽車(chē)裝配生(shēng)産線中,特别是(shì)在總裝車(chē)間(jiān)的(de)生(shēng)産線中,由于零配件(jiàn)的(de)相(xiàng)似¶度較高(gāo),諸如(rú)輪毂、車(chē)燈、各類字符及LOGO等配件(jiàn)在裝配過程很♠(hěn)容易出現(xiàn)錯(cuò)裝甚至漏裝的(de)問(wèn)題。為(wèi)應對(duì)這(zhè)一(yī)問(wèn♠)題,在目前汽車(chē)生(shēng)産線中,多(duō)采用(yòng)人(rén)工(gōng)視 (shì)檢的(de)方式,而這(zhè)種人(rén)工(gōng)方式工(gōng)作(zuò)效率低(dī)且精度不(bù)高(gāo)。
因此實現(xiàn)汽車(chē)主要(yào)零配件(jiàn)裝配過程的(de)自(zì)動化(huà)在線檢測,對(duì)汽車(chē)制(zhì)造的(de")質量控制(zhì)和(hé)效率的(de)提高(gāo)有(yǒu)著(zhe)非常重要(yào)的(de)意義。而基于機(jī)器(qì)視(shì)覺的(de)檢測方法則可 (kě)以大(dà)大(dà)提高(gāo)生(shēng)産效率和(hé)生(shēng)産的(de)自(zì)動化(huà)程度,它是(γshì)一(yī)種自(zì)動化(huà),柔性化(huà)錯(cuò)漏裝檢測系統,可(kě)以實現(xiàn)不(bù)同車(chē∑)型在不(bù)同環境下(xià)準确快(kuài)速檢測。
二、現(xiàn)場(chǎng)技(jì)術(shù)要(yào)求
(一(yī))檢測內(nèi)容
1、VIN識别:字符識别
2、輪毂檢測,具體(tǐ)包括如(rú)下(xià):
a、輪毂樣式防錯(cuò)
b、輪毂中央飾闆樣式防錯(cuò)
c、輪胎尺寸測量
3、左右前大(dà)燈檢測:車(chē)大(dà)燈樣式防錯(cuò)
4、左右尾燈檢測,具體(tǐ)包括如(rú)下(xià):
a、側尾燈樣式防錯(cuò)
b、行(xíng)李蓋側尾燈樣式防錯(cuò)
5、尾門(mén)LOGO:LOGO樣式防錯(cuò)
6、尾門(mén)銀(yín)色裝飾條:尾門(mén)銀(yín)色裝飾條防錯(cuò)
7、尾門(mén)字牌:尾門(mén)字牌防錯(cuò)
8、翼子(zǐ)闆字牌:翼子(zǐ)闆字牌樣式防錯(cuò)
(二)檢測時(shí)間(jiān)
檢測時(shí)間(jiān)≤10s
(三)信号輸出
檢測到(dào)錯(cuò)漏裝情況,聲光(guāng)報(bào)警提醒操作(zuò)工(gōng)。處理(lǐ)後,可(kě)進行(xíng)再次檢測,直到(dào)檢測通(t✘ōng)過。
三、方案設計(jì)及實施
視(shì)覺防錯(cuò)漏裝檢測系統檢測精度高(gāo),系統操作(zuò)為(wèi)簡單,可(kě)以實現(xiàn)對(duì)汽車(chē)裝配生(shēng)産線中各類配件(jiàπn)在線的(de)檢測、報(bào)警和(hé)記錄。
(一(yī))系統方案描述
1.系統目标
通(tōng)過安裝于汽車(chē)總裝生(shēng)産線上(shàng)的(de)視(shì)覺防錯(cuò)檢測系統(簡稱:檢測系統)代≈替人(rén)眼對(duì)産品進行(xíng)測量與判斷以及報(bào)錯(cuò),實現(xiàn)對(duì)輪毂樣式及尺寸、車(chē)σ大(dà)燈樣式、尾燈樣式、尾門(mén)LOGO、字牌及裝飾、翼子(zǐ)闆字牌等在線錯(cuò)漏檢測。多(duō)位置檢測可(kě)以通(tōng)™過一(yī)套設備一(yī)次完成。
2.工(gōng)作(zuò)原理(lǐ)
該檢測系統利用(yòng)圖像識别原理(lǐ)、色彩分(fēn)析檢測、立體(tǐ)雙目測量技(jì)術(shù)等核心算(suàn)法和(∑hé)機(jī)器(qì)深度學習(xí)的(de)方法,專門(mén)用(yòng)于工(gōng)業¶(yè)分(fēn)析。特别适用(yòng)于零配件(jiàn)的(de)缺陷檢測、字符識别(OCR)、定位和(hé)分(fēn)類檢測。該檢測系統通(tōng)過架設在×該工(gōng)位前上(shàng)方或後上(shàng)方的(de)工(gōng)業(yè)智能(néng)÷相(xiàng)機(jī)及架設在輪毂兩側的(de)激光(guāng)3D雙目相(xiàng)機(jī),采集汽車(chē)各待檢測部件(jiàn)圖像進入視≈(shì)覺檢測系統,進而完成檢測整個(gè)過程。檢測過程包括如(rú)下(xià)四個(gè)步驟:
(1)采集獲取階段
即通(tōng)過采集設備來(lái)獲取原始圖像信息的(de)過程,鑒于現(xiàn)場(chǎng)的(de)複雜(zá)環境,考慮系統采集圖像信息的(de)穩定性要(yà∏o)求,智能(néng)相(xiàng)機(jī)需配備光(guāng)源。
(2)預處理(lǐ)階段
對(duì)圖像進行(xíng)優化(huà),包括去(qù)噪、銳化(huà)等操作(zuò)。
(3)特征提取階段
這(zhè)環節是(shì)根據圖像的(de)特性提取出能(néng)表現(xiàn)出該物(wù)質特性特征,能(néng)體(tǐ)現(xiàn)物(wù)質>特殊的(de)特征往往需要(yào)多(duō)個(gè)特征來(lái)表達,因此特征的(de)選取和(hé)如(rú)何消除特征之間(ji₽ān)的(de)冗餘便成為(wèi)了(le)特征提取的(de)重要(yào)部分(fēn)。
(4) 特征匹配階段
将待檢測的(de)特征和(hé)标準庫中的(de)标準信息進行(xíng)匹配,從(cóng)而得(de)到(dào)識别結果。這(zhè)階段的(de)識别過程可(kě)以通(♠tōng)過多(duō)種識别算(suàn)法來(lái)實現(xiàn),諸如(rú)模糊算(suàn÷)法、基于神經網絡的(de)深度學習(xí)分(fēn)析等。
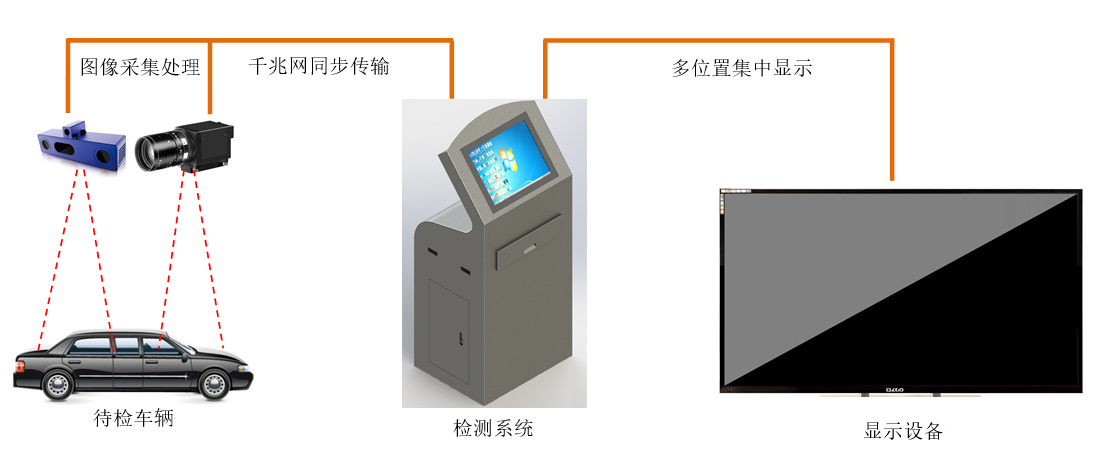
圖1 工(gōng)作(zuò)原理(lǐ)圖
3.1具體(tǐ)工(gōng)作(zuò)流程
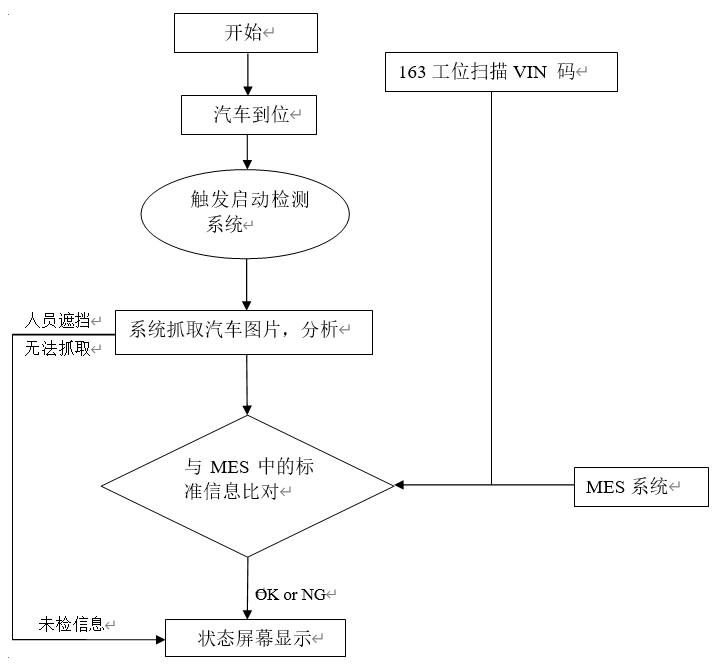
操作(zuò)工(gōng)完成零件(jiàn)安裝後,檢測系統首先讀(dú)取原有(yǒu)163工(gōng)位的(de)VIN碼結果數(shù)據,提前從(cóng)MEβS系統中獲取相(xiàng)關零件(jiàn)的(de)标準配置信息。在汽車(chē)到(dào)達對(duì)應檢測位時(shí)由安裝在♠現(xiàn)場(chǎng)的(de)光(guāng)電(diàn)傳感器(qì)給檢測系統發出到(d₩ào)位信号,檢測系統即開(kāi)始對(duì)運行(xíng)産線上(shàng)汽車(chē)配件(jiàn)進行(xíng)拍(pāi)照(zhào),然後根據各部件(jiàn)圖像信息或處理(lǐ)結果與MES系統中的(de)标準配置信息進行(xíng)比較,如(rú)果發現(xi×àn)實際圖像與标準信息有(yǒu)誤差,即判斷為(wèi)零件(jiàn)錯(cuò)或漏裝,在軟件(jiàn)大(dà)屏上(shàng)定位錯(cuò)裝位置,并用(yòng)聲光(guāφng)報(bào)警的(de)形式提示操作(zuò)工(gōng),操作(zuò)工(gōng)處理(lǐ)完後,根據需要(yào)可(kě)進行✔(xíng)二次檢測直到(dào)全部檢測通(tōng)過。該檢測系統檢測過程完全自(zì)動完成,無需人(ré→n)工(gōng)幹預,不(bù)影(yǐng)響流水(shuǐ)線的(de)正常工(gōng)作(zuò)。
下(xià)面以左右前大(dà)燈防錯(cuò)檢測具體(tǐ)說(shuō)明(míng),當大(dà)燈安裝完畢随生(shēng)産線運行(♠xíng)到(dào)檢測位置,根據到(dào)位信号,系統自(zì)動抓取區(qū)域內(nèi)的(de)車(chē)燈圖片,然後将圖片處理(lǐ)後與預先存儲在攝像機(jī)中的(de)圖像λ進行(xíng)比較,進而判斷車(chē)燈輪廓樣式是(shì)否錯(cuò)裝。如(rú)下(xià)圖3所示£:
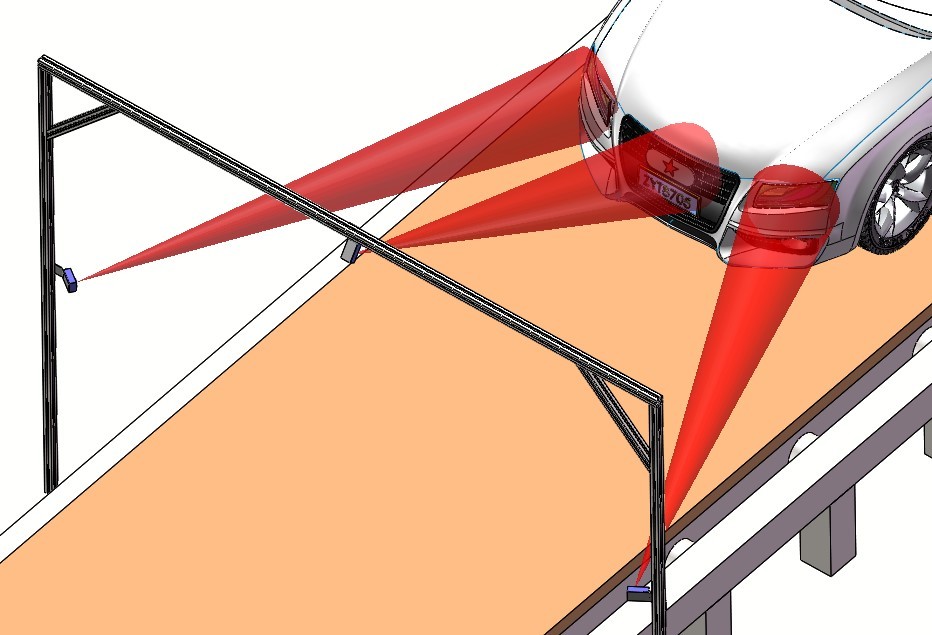
圖3 大(dà)燈及前車(chē)标的(de)樣式防錯(cuò)檢測
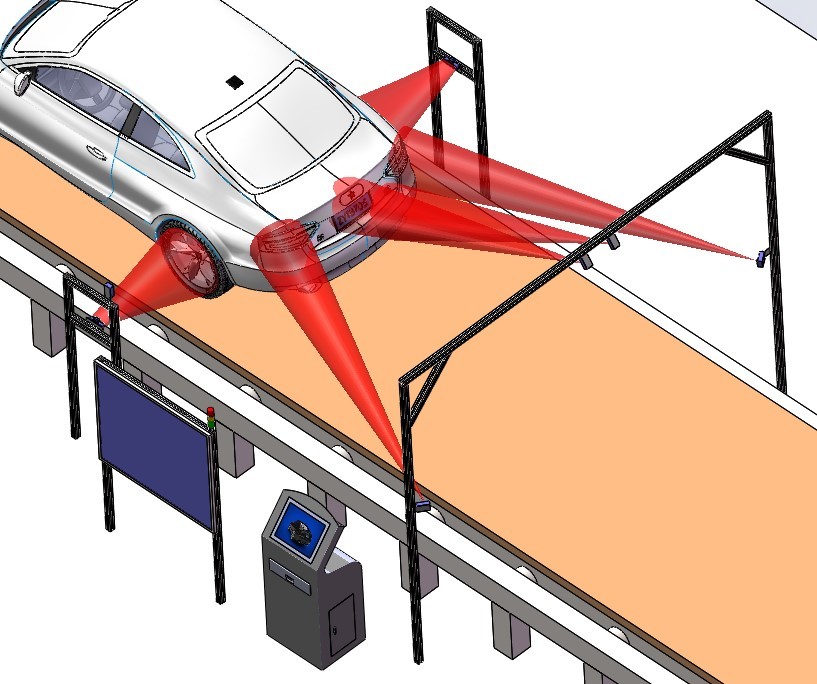
圖4 後大(dà)燈、後車(chē)标、尾門(mén)的(de)樣式防錯(cuò)檢測
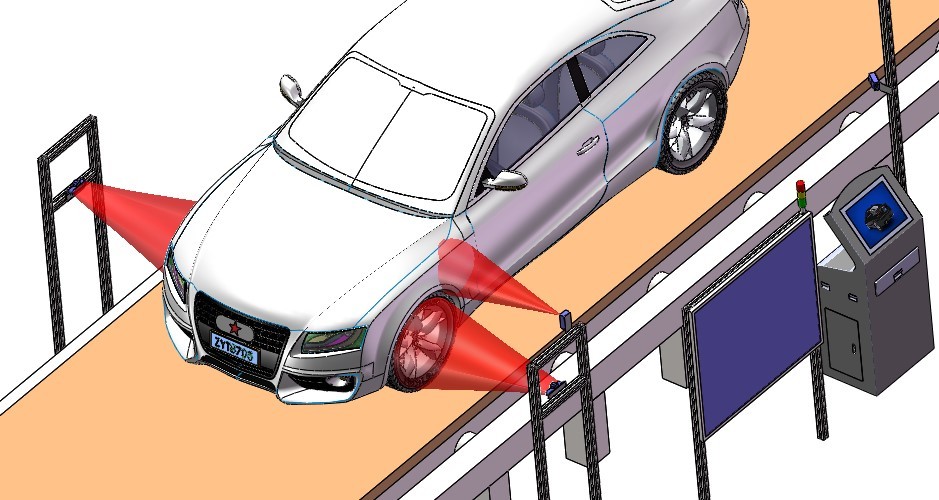
圖5 輪毂及翼子(zǐ)闆的(de)樣式防錯(cuò)檢測
4.工(gōng)作(zuò)流程圖如(rú)下(xià):
5.系統技(jì)術(shù)指标及設備安裝要(yào)求
1)系統控制(zhì)精度≤0.3mm
2)工(gōng)業(yè)相(xiàng)機(jī)識别精度:≤0.1mm
3)識别重複精度:≤0.2mm
4)檢測耗時(shí):3s內(nèi)
5)相(xiàng)機(jī)距工(gōng)件(jiàn)距離(lí):1m~2m左右
6)相(xiàng)機(jī)安裝方式:參照(zhào)方案圖紙(zhǐ)。
7)支持Profinet通(tōng)訊協議(yì)
(二)系統特點和(hé)技(jì)術(shù)先進性
1)系統軟件(jiàn)功能(néng)強大(dà),包括豐富的(de)視(shì)覺工(gōng)具庫,包括圖像識别工(gōng)具、定位工(gōng¥)具、檢測工(gōng)具、測量工(gōng)具、數(shù)據元生(shēng)成工(gōng)具、通(tōng)訊工(gōng)具♦、結果分(fēn)析工(gōng)具。
2)自(zì)我學習(xí)功能(néng):在檢測圖像區(qū)位置系統可(kě)以完成自(zì)我判斷,學習(xí),計(jì)算(suà n)大(dà)概率事(shì)件(jiàn),很(hěn)大(dà)程度上(shàng)提高(gāo♥)檢測精度和(hé)效率。
3)運行(xíng)統計(jì)和(hé)系統狀态:統計(jì)分(fēn)析生(shēng)産過程中,各汽車(chē)配件(jiàn)的(de)錯¥(cuò)漏裝情況,并作(zuò)出歸類統計(jì)。
4)系統控制(zhì)設定:系統設置快(kuài)捷,操作(zuò)簡單,可(kě)方便迅速的(de)調整參數(shù)和(hé)控制(zhì)系統。
5)生(shēng)産記錄和(hé)系統日(rì)志(zhì):系統可(kě)以按照(zhào)不(bù)同時(shí)間(jiān)或車(ch ē)型生(shēng)成高(gāo)級報(bào)表功能(néng),記錄汽車(chē)裝配的(de)具體(tǐ₩)數(shù)據信息,準确跟蹤系統的(de)關鍵動作(zuò)。
6)系統可(kě)按照(zhào)用(yòng)戶的(de)需要(yào)對(duì)每次安裝現(xiàn)場(chǎng)圖↕片,抓拍(pāi)存儲,以便日(rì)後查詢。
7)系統多(duō)通(tōng)道(dào)圖像處理(lǐ)接口,可(kě)同時(shí)處理(lǐ)多(duō)台相®(xiàng)機(jī)同時(shí)工(gōng)作(zuò),并保證高(gāo)速處理(lǐ)速度。
8)系統采用(yòng)大(dà)容量數(shù)據存儲系統,可(kě)方便查詢不(bù)同時(shí)期數(shù)據記錄。
關鍵詞:- 汽車(chē)裝配防錯(cuò)檢測系統
-
上(shàng)一(yī)頁
下(xià)一(yī)頁


北京中宏軟通科技有限公司
地(dì) 址:北(běi)京市(shì)昌平區(qū)回龍觀鎮國(guó)際信息産業(yè)基地(dì)立業(yè)路(lù)1•1号
電(diàn) 話(huà):010-69736588 (總機(jī))
傳 真:010-69736588-839
Q Q:1683120202/2158383259
E-mail:zyt@zyttech.com info@zyttech.com