



業(yè)應用(yòng)")


程案例")

RELIABLE QUALITY PERFECT SERVICE
可(kě)靠的(de)質量 ● 完善的(de)服務

機(jī)械手自(zì)動撈渣系統
- 産品描述
- 産品功能(néng)特點
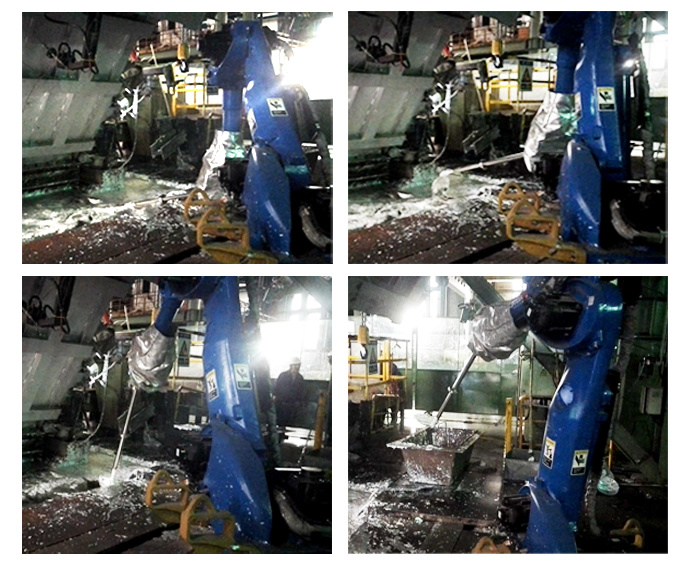
- 産品實例
-
産品簡介:
機(jī)械手自(zì)動撈渣機(jī)器(qì)人(>rén)是(shì)全自(zì)動運行(xíng)産品,技(jì)術(shù)成熟,可(kě)滿足鍍鋅線鋅鍋撈渣作(zuò)業(yè)需求,能(néng)夠按程序設定自(zì)動撈除高(gāo)溫鋅液表面鋅渣及氧化(huà)物(wù)雜(zá)質。撈渣機(jī)器(qì)人(rén€)由6自(zì)由度機(jī)械手和(hé)伺服控制(zhì)器(qì)組成,能(néng)夠靈活調整姿态并完成狹小(xiǎo)空(kōng)間(jiān)液面撈渣作®(zuò)業(yè)。

工(gōng)作(zuò)模式:
自(zì)動模式:通(tōng)過操作(zuò)箱上(shàng)的(de)“全自(zì)動啓動”來(lái)觸發全自÷(zì)動程序,全自(zì)動模式下(xià)機(jī)械手會(huì)按照(zhào)預先設計(jì)好(hǎo)的( de)程序依次執行(xíng)撈渣動作(zuò)。
半自(zì)動模式:對(duì)機(jī)械手負責的(de)區(qū)域進行(xíng)幾個(gè)區(qū)域的(de)劃分(fēn),通(tōng)過人(rén)工(gōng)對(duì)α區(qū)域進行(xíng)選擇,然後選擇“半自(zì)動啓動”來(lái)觸發選定區(¥qū)域的(de)撈渣程序,對(duì)固定區(qū)域進行(xíng)一(yī)次撈渣操作(zuòλ)。
手動模式:對(duì)機(jī)械手進行(xíng)回零位操作(zuò)。調整到(dào)最初的(de)等待姿态。有(yǒu)橫移≠的(de)A側可(kě)以進行(xíng)橫移的(de)回零和(hé)手動JOG操作(zuò)。
技(jì)術(shù)特點:
(1)具有(yǒu)較高(gāo)的(de)可(kě)靠性和(hé)低(dī)的(de)維修率。
(2)多(duō)重檢測保護措施,充分(fēn)避免了(le)因設備故障、人(rén)為(wèi)操作(zuò)等原因造成的(de)設備損壞,降低(dī)了(l©e)檢修成本,提高(gāo)生(shēng)産效率。
設備特點:
鍍鋅線生(shēng)産過程中,鋅鍋液面連續産生(shēng)浮渣,大(dà)量浮渣聚集後會(huì)對(duì)帶鋼産品質量造成嚴重影(yǐ"ng)響,而機(jī)械手撈渣系統具有(yǒu)高(gāo)效、安全、耐高(gāo)溫等特點,同時(s∑hí)可(kě)避免人(rén)工(gōng)撈渣産生(shēng)的(de)鋅液損失。
機(jī)械手撈渣系統采用(yòng)6自(zì)由度機(jī)械手,配合¶伺服控制(zhì)系統工(gōng)作(zuò),可(kě)在狹小(xiǎo)空(kōng)間(jiān)內(nèi)靈活調整姿态完成撈渣作(zuò)業(yè)。
序号
标準号
标準名稱
1
GB5226.2-2002
機(jī)械安全 機(jī)械電(diàn)器(qì)設備
2
GB9448-1999
焊接與切割技(jì)術(shù)
3
DL/T5165.3-2002
電(diàn)氣裝置安裝工(gōng)程質量檢驗及評定規章(zhāng)
4
GB/T4830-1984
工(gōng)業(yè)自(zì)動化(huà)儀表氣源壓力範圍和(hé)質量
5
GB/T7353-1999
工(gōng)業(yè)自(zì)動化(huà)儀表盤、櫃、台、箱
6
JB/T 9269-1999
工(gōng)業(yè)控制(zhì)計(jì)算(suàn)機(jī)系統安裝環境條件(jiàn)
7
HG/T20700-2000
可(kě)編程控制(zhì)器(qì)系統工(gōng)程設計(jì)規定
8
HG/T20511-2000
信号報(bào)警、解鎖系統設計(jì)規定
9
HG/T20512-2000
儀表配管、配線設計(jì)規定
10
YB/T036.20-1992
冶金(jīn)設備通(tōng)用(yòng)技(jì)術(shù)條件(jiàn)管道(dào)與容器(qì)防鏽
11
GB50387-2006
冶金(jīn)機(jī)械液壓、潤滑和(hé)啓動設備工(gōng)程安裝驗收規範
12
GB/T13384-2008
幾點産品包裝通(tōng)用(yòng)技(jì)術(shù)條件(jiàn)
表1設備設計(jì)、制(zhì)造檢驗标準
工(gōng)作(zuò)現(xiàn)場(chǎng):
 關鍵詞:
關鍵詞:- 機(jī)械手自(zì)動撈渣系統
-
-
工(gōng)作(zuò)現(xiàn)場(chǎng)
上(shàng)一(yī)頁
下(xià)一(yī)頁


北京中宏軟通科技有限公司
地(dì) 址:北(běi)京市(shì)昌平區(qū)回龍觀鎮國(guó)際信息産業(y≥è)基地(dì)立業(yè)路(lù)11号
電(diàn) 話(huà):010-69736588 (總機(jī))
傳 真:010-69736588-839
Q Q:1683120202/2158383259
E-mail:zyt@zyttech.com info@zyttech.com